
Project
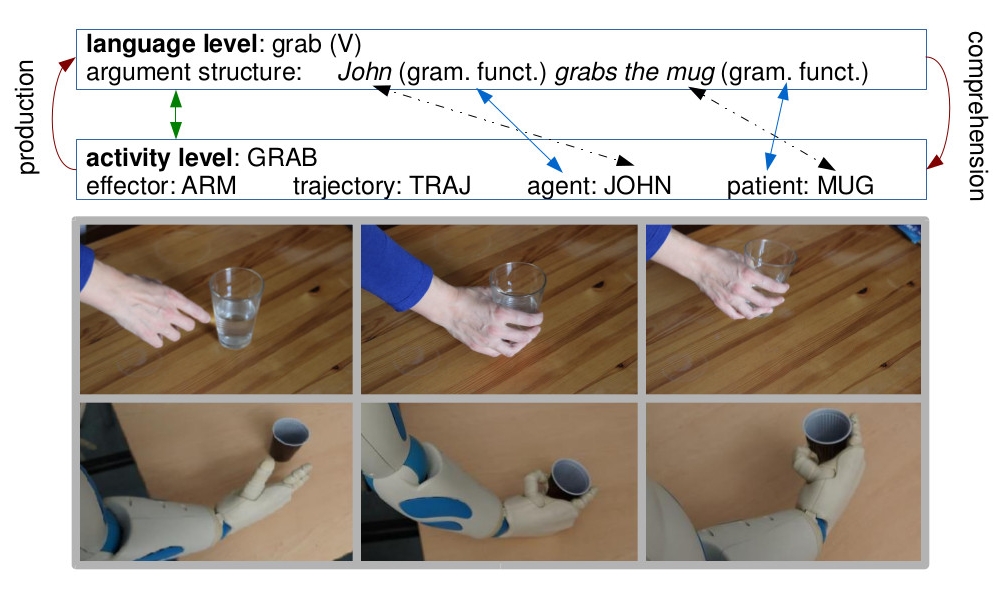
Future social robots will need the ability to acquire new tasks and behaviors on the job both through observation and through natural language instruction. In this project, we tackle the critical subproblem of learning new actions and their corresponding words by the artificial system observing how those actions are performed and expressed by a human tutor. As a result, robots are enabled to acquire action concepts, learn and execute actions, and talk about them.
Coordinator
Stephanie Gross
Austrian Research Institute for Artificial Intelligence (OFAI)
Freyung 6/6
1010, Vienna
Austria
stephanie.gross@ofai.at
http://www.ofai.at/~stephanie.gross/